The core of the project is the perception of the environment using intelligent infrastructure units called road side unit (RSU). A RSU consists of three main components: (i) a pole-like structure (mast), (ii) a sensor cluster and a communication unit on top and (iii) a control cabinet at the bottom. Each RSU is 4.5 m high and deployed on the field at approximately 200 m distance from each other. Depending on the coverage area around the RSU, various types and combinations of sensors including RADAR, LiDAR and camera are mounted on the top of the mast using a 3D mechanical sensor mounting assembly.
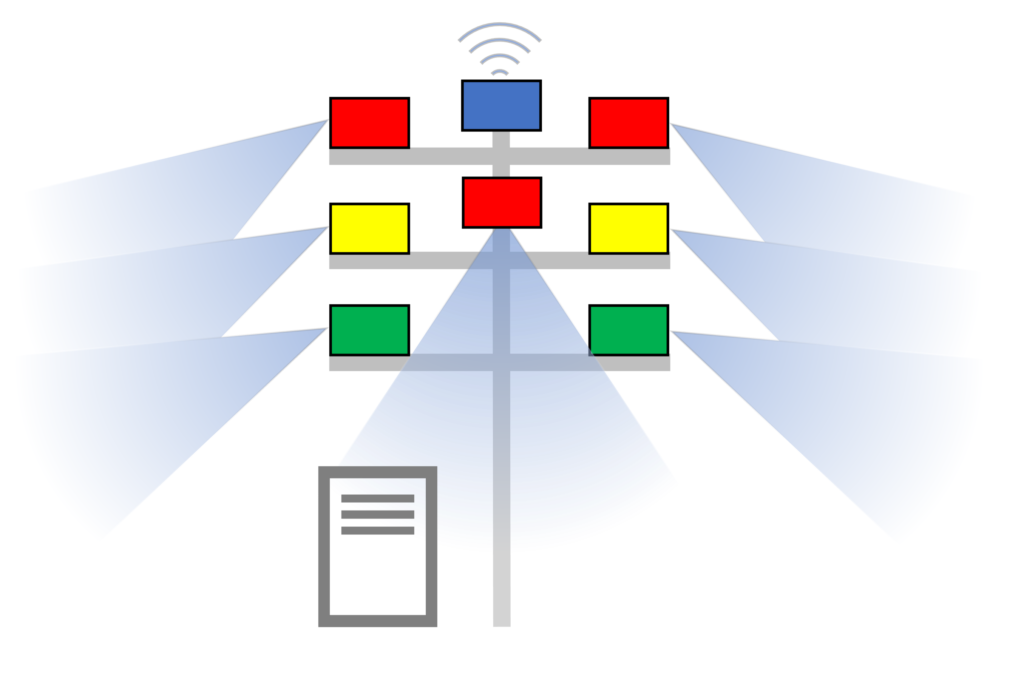
RADAR (green), LiDAR (yellow), camera (red), Vehicle-2-X (blue)

The test field covers mostly a two lane lane road with junctions, a pedestrian crossing and curves. The designed RSU, which is equipped withe the full set of sensors, contains in total seven sensors. One set of RADAR, LiDAR and camera with a far view lens covers one side of the RSU with up to 100 m perception range. Another set of the same sensors is directed to the opposite side of the first set. Additionally, as the sensors are mounted at a height of approximately 4 m, a blind-spot up to a certain distance near the mast exists. This is covered by adding a camera with a fish eye lens directed downwards and providing continuous coverage.
Each RSU has a control cabinet, which is placed on the ground close to the mast. This cabinet contains the required electrical components and computing devices. They include the application unit for sensor data processing, the control unit for management and network components. Each sensor at the top of the mast is connected to the application unit through a switch. The application unit acts as central computer for each RSU to collect sensor data and apply algorithms for object detection, classification and tracking. Further, the processed data is sent to a centralized station called Mission Control located at the place as shown with purple box in the map above. The Mission Control contains high-performance computing devices and executes the final sensor data fusion from all the RSUs in the field.