The Mission Control System (MCS) collects data from individual roadside units from the test field, processes data and provides feedback. The concept of the MCS is to combine monitoring of objects locations, tracking them around the whole test track, and advanced functions to provide additional information primarily to connected automated vehicles.
Traffic monitoring function
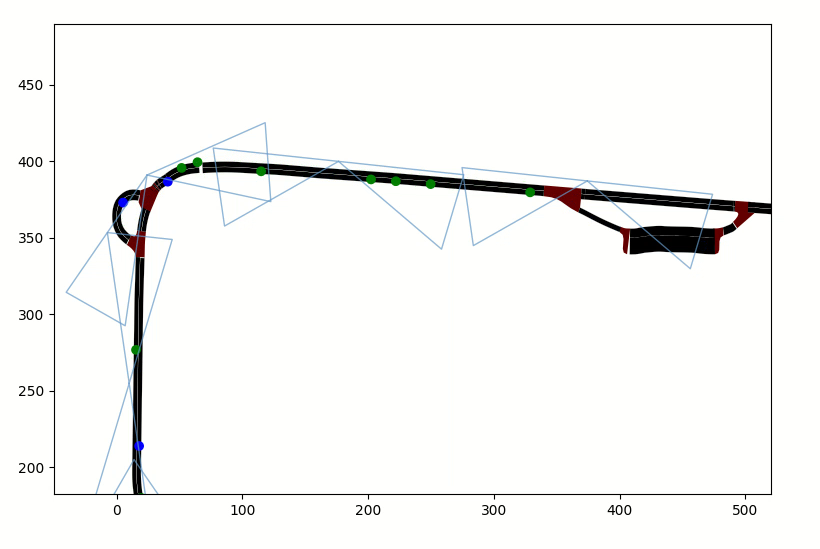
The higher mounting points of individual sensors at roadside units enables that sensors can perceive objects from a different perspective compare to vehicle onboard sensors. This information is collected and fused to create a global test-field object list. The monitoring function tracks objects and estimates their positions when they get outside of sensor range, e.g. between two roadside units or if an object is occluded. It allows maintaining the same global unique ID for every object within the entire test field.
Extended perception function
Based on the complete global object list, the system has an overview of the objects within the test track. The system shares the information about relevant objects to the connected vehicles. This information includes data that is out of vehicle sensor ranges. It gives more time for a connected automated vehicle to plan its manoeuvres.
Another advanced function is a response to emergency vehicles. The mission control system distributes the information about the approaching of an emergency vehicle to all connected vehicles within the range of the test field.
Supportive functions
Supportive functions target to improve comfort. One such function is the weather warning function, which informs connected vehicles about potential ice or rain. Another function distributes traffic light phases to optimize traffic flow and, as a result, lower emission or power consumption of the vehicles.